

Specifications
| Parameter | Description |
|---|---|
| Product Name | Through Hole Pneumatic Gripper |
| Series | MHSH3 Series |
| Gripper Type | 3-Finger Parallel Air Gripper |
| Finger Structure | 3 Fingers |
| Action Type | Double Acting |
| Working Medium | Clean Air |
| Operating Pressure | 0.1~0.6 MPa |
| Repeatability | ±0.01 mm |
| Body Material | Aluminum Alloy |
| Structure Type | Wedge Cam Parallel Structure |
| Through Hole Type | Center Through Hole |
| Motion Type | Parallel Opening and Closing |
| Mounting Type | ISO Standard Mounting |
| Compatible with | SMC MHSH3 Series |
| Applications | Robotic Handling / Machine Tool Loading / Transfer Systems |
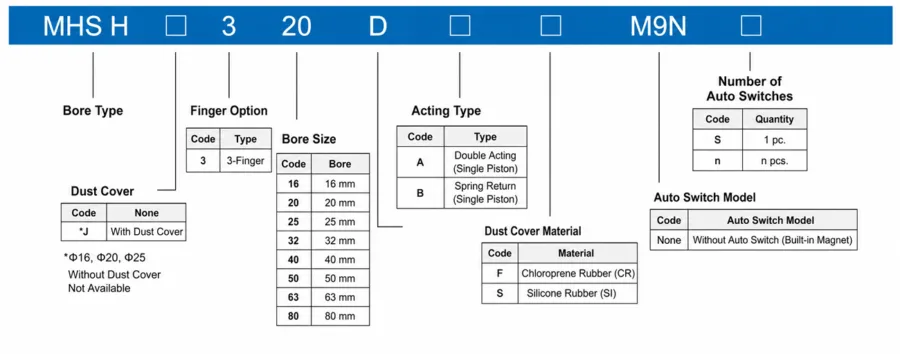
How to order
Product Features
Center Through Hole Structure
The MHSH3 Series adds a center through hole design to help support reliable release and positioning of cylindrical workpieces in automation systems.
3-Finger Parallel Gripping Motion
The 3-finger structure provides stable gripping force for round, spherical, and irregular workpieces used in industrial handling applications.
Compact Wedge Cam Mechanism
The wedge cam construction helps maintain high gripping force while reducing overall body size for compact automation equipment.
High Repeatability Performance
Designed for repeatable gripping operations with repeatability up to ±0.01 mm in industrial automation environments.
Durable Aluminum Alloy Body
The lightweight aluminum alloy housing supports long-term industrial operation while simplifying equipment integration.
Suitable Replacement for SMC MHSH3 Series
Designed for pneumatic gripping applications requiring replacement for SMC MHSH3 Series models.
Automation-Friendly Installation
ISO standard mounting structure helps simplify installation into robotic EOAT systems, machine tools, transfer equipment, and automated fixtures.
Applications
Machine Tool Loading and Unloading
Suitable for gripping cylindrical workpieces during CNC machining automation operations.
Robotic End-of-Arm Tooling
Used in robotic handling systems requiring stable 3-finger gripping movement.
Pick-and-Place Systems
Supports automated gripping, transfer, and positioning of round and irregular components.
Assembly Automation
Applied in assembly systems requiring repeatable gripping and positioning performance.
Industrial Transfer Equipment
Suitable for transfer, feeding, sorting, and handling systems in industrial automation environments.
Why Choose HOMIPNEU
- Stable pneumatic gripper manufacturing quality
- Through hole structure for reliable workpiece release
- Compact wedge cam mechanism with high gripping force
- ISO standard mounting for easier automation integration
- Multiple bore size configurations available
- Support for customized finger structures and dimensions
- Reliable supply for industrial bulk orders
- Suitable for machinery manufacturers and robotic automation integrators
FAQ
Is the MHSH3 Series interchangeable with SMC MHSH3 Series?
Yes, the MHSH3 pneumatic gripper is designed to be interchangeable with SMC MHSH3 Series in many industrial automation applications.
What is the advantage of the through hole structure?
The center through hole helps support reliable release and positioning of cylindrical and round workpieces in automation systems.
What type of gripping structure does the MHSH3 Series use?
The MHSH3 Series uses a wedge cam parallel gripping structure with 3-finger gripping movement.
What repeatability does the MHSH3 Series provide?
Typical repeatability is approximately ±0.01 mm depending on operating conditions.
Can customized gripper configurations be supported?
Yes, customized finger structures, mounting dimensions, and application-specific gripping solutions can be supported.
OEM & ODM Support
HOMIPNEU provides OEM and ODM manufacturing services for MHSH3 pneumatic grippers, including customized finger structures, mounting dimensions, logo branding, export packaging, and pneumatic automation support for distributors, machinery manufacturers, and robotic system integrators.







